Sivu 2/2
Re: Kokeilematon malli
Lähetetty: 22 Loka 2017, 13:34
Kirjoittaja jori
Kyllä tuollaisen tosiaan voi rakentaa omaksi iloksi ja opiksi, ja sillä voi toki ajaakin, joskin turvallinen vauhti on varsin maltillinen. Tuo vinon ohjausakselin aiheuttama "oikaisumomentti" on kyllä paikoillaan ihan merkittävä, mutta heti kun ajoneuvo liikkuu ja kaartaa, painovoiman kaveriksi tulee tätä vastaan kohtisuora kiihtyvyysvektori, joka ikäänkuin muuttaa painovoiman vinoksi. Vinon nivelen oikaisumomentti alkaa siis oikaista tähän uuteen, vinoon suuntaan. Vino voima kääntää ohjausta, mikä lisää ohjauskulmaa, mikä lisää sivukiihtyvyyttä (keskipakovoima), mikä lisää vinoutta jne. Hyvin hitaassa nopeudessa tuo kierre ylittää painovoiman ja vinon ohjausakselin oikaisumomentin ja ajoneuvo muuttuu labiiliksi.
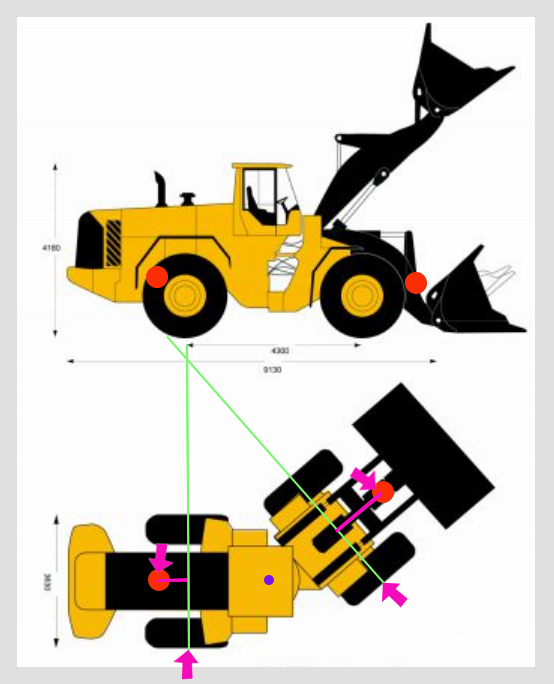
Kantavien pyörien väliin ampuva (ohjausakselin jatke osuu maahan) ajoneuvo on aina labiili, eli ohjaus pyrkii kaarteessa kääntymään lisää, ellei toistensa suhteen kääntyvien osien osapainopisteet ole akseliensa ulkopuolella, kuten esimerkiksi runko-ohjatuissa työkoneissa.
Vinon ohjausakselin ja negatiivisen jätön oikaisumomentti ei lisäänny ajonopeuden mukaan, kuten kaarrekiihtyvyydet, jotka tuon oikaisumomentin kumoavat jo hyvinkin hitaassa vauhdissa.
Tuo osapainopisteiden tuoma oikaisumomentti on lisääntyy kaarrekiihtyvyyden mukana ja säilyy aina oikaisevaan suuntaan. Tämä tarkoittaa, että stabiilissa ajoneuvossa, jossa ohjausakseli ampuu pyörien maakosketuspisteiden rajaaman alueen sisäpuolelle, ohjausnivelen kantaman taivutusmomentin pitää taivuttaa runkoa niin, että ohjausnivel pyrkii ylös päin. Jos ohjausnivel kantaa taivutusta alas, on ajoneuvo labiili ja vaatii siis erityistoimia kovemman vauhdin ohjaukseen.
Re: Kokeilematon malli
Lähetetty: 22 Loka 2017, 15:36
Kirjoittaja MM
jooseha kirjoitti:Pistä tehden vaan. Ei me sitä suostuta kuitenkaan pelkästään teorian pohjalta pitämään hyvänä. Tarvitaan toimiva käytännön esimerkki 
No, tämähän on sitä teorian testausta. Tuosta jorin selostuksesta puuttuu ainakin kovin selvästi ilmaistuna kanta siihen mitä vaikuttaa se, kun ohjausakseli on enemmän vaaka- kuin pystysuunnassa. Luulisi painopisteen sijainnin ohjausakselilinjan yläpuolella pyrkivän kumoamaan keskipakovoiman ohjauskulmaa lisäävää vaikutusta ja olemaan akselia alas painava momentti staattisen ajajan painon lisäksi.
Re: Kokeilematon malli
Lähetetty: 22 Loka 2017, 15:52
Kirjoittaja jori
MM kirjoitti:jooseha kirjoitti:Pistä tehden vaan. Ei me sitä suostuta kuitenkaan pelkästään teorian pohjalta pitämään hyvänä. Tarvitaan toimiva käytännön esimerkki
No, tämähän on sitä teorian testausta. Tuosta jorin selostuksesta puuttuu ainakin kovin selvästi ilmaistuna kanta siihen mitä vaikuttaa se, kun ohjausakseli on enemmän vaaka- kuin pystysuunnassa. Luulisi painopisteen sijainnin ohjausakselilinjan yläpuolella pyrkivän kumoamaan keskipakovoiman ohjauskulmaa lisäävää vaikutusta ja olemaan akselia alas painava momentti staattisen ajajan painon lisäksi.
Tuossa systeemissä vain takapyörä kallistuu kääntyessään, eli vain siihen kytkeytyvien massojen korkeusasemalla on merkitystä. Pyörän kallistumissuunnan voimathan tukeutuvat rungon kautta etupyöriin ja sitä kautta tiehen, joten ukon painopisteen paikka korkeussuunnassa ei vaikuta mitään takapyörän elämään. Kääntyvän takapyörän oma painopiste vaikuttaa toki balanssoivasti samalla tavalla kuin jalat pythonissa. Pelkkä takapyörä ei kuitenkaan ole kovin painava, vaikka vipuvarttakin on.

Re: Kokeilematon malli
Lähetetty: 22 Loka 2017, 16:08
Kirjoittaja MM
Niinpäs onkin. Oli ajatusvirhe, myönnetään.