Hi there
Sorry for the English ![]()
Can I ask a few questions about this build ?
I am going to build a FlevoTrike as I want a higher seat and narrower track than my current Python trike.
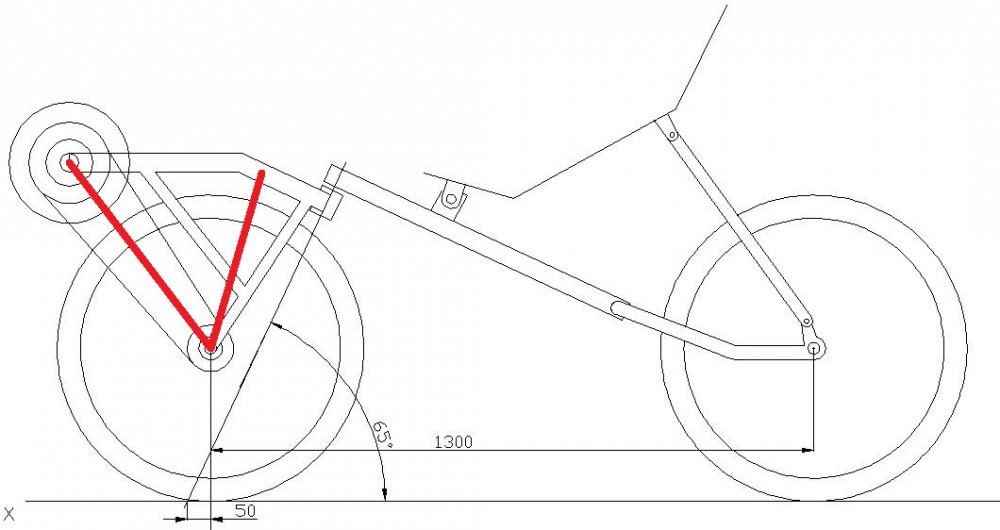
However for my Flevotrike I want to use the pivot angle and trail of Python trike to make it handle more Python like.

I have built a quick prototype re-using as many parts as I currently have , shown in picture above behind current trike and like you have been experimenting with elastomers.

I added a second elastomer because it tilted to fast with one and also with one elastomer the upper beam yawed left and right when riding adding unwanted steering input.
I see you have used springs as well , what did you end up with ?
What did you mean by elastomer memory ?
If I understand correctly you also limited the steering to about 45' , that would also make it more like my Python.
I also want the rear end narrow , you found @ 405mm track it handled better.
Did you consider the handle bars mounted on the steering part ? I feel safer on my Python riding like that.
regards Paul